Arduino UNOによる自動運転モデルが完成。
今朝は、少々ランニングの要素を取り入れたウォーキングです。

阪急8300系です。



iPhoneのiOSをアップデートしました。
夏の風物詩である甲子園球場での高校野球。
今年も明徳義塾が泊まりに来ました。

九州新幹線を見ながら出社です。

今日も昼食は糖尿病食です。
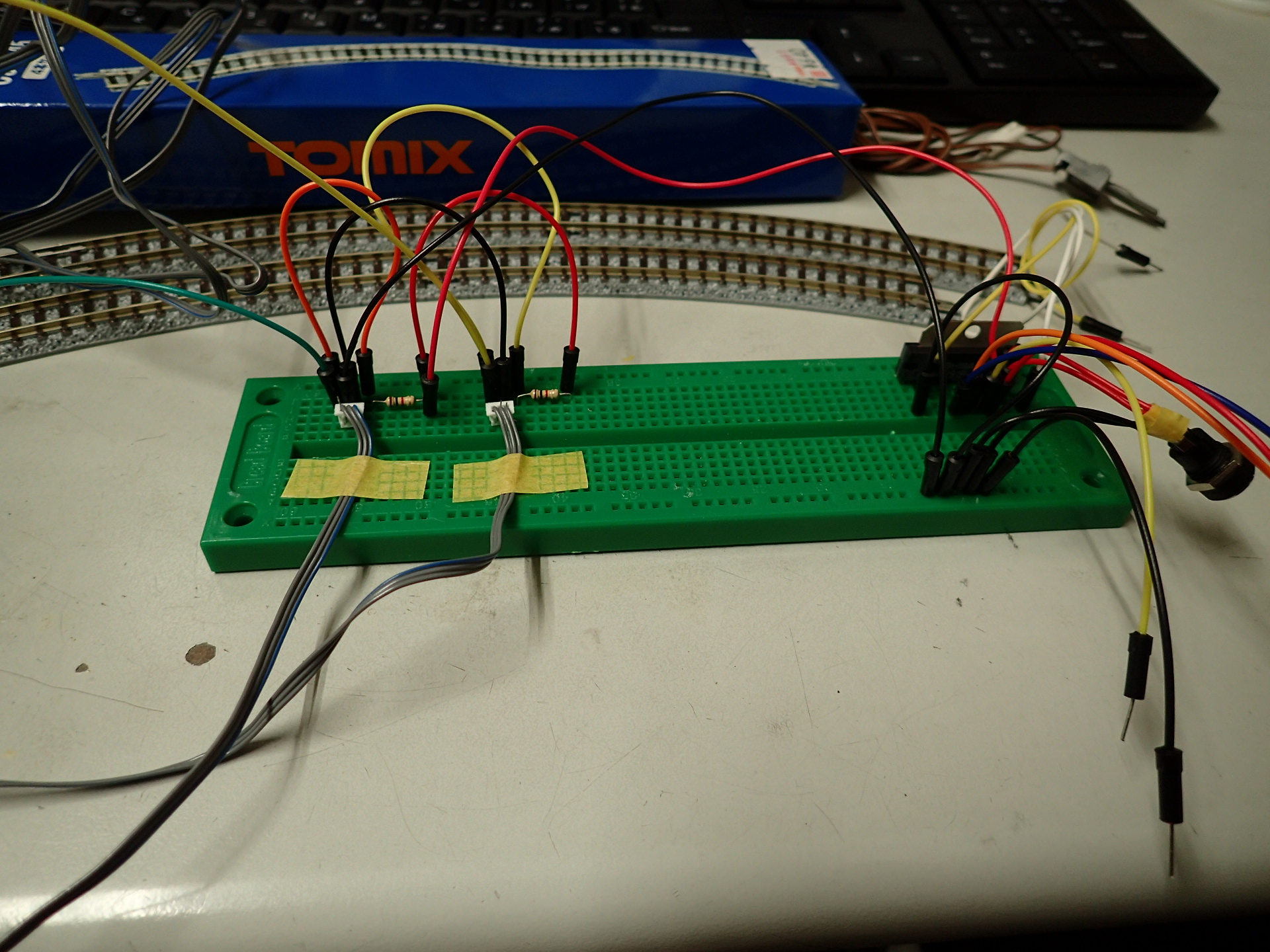
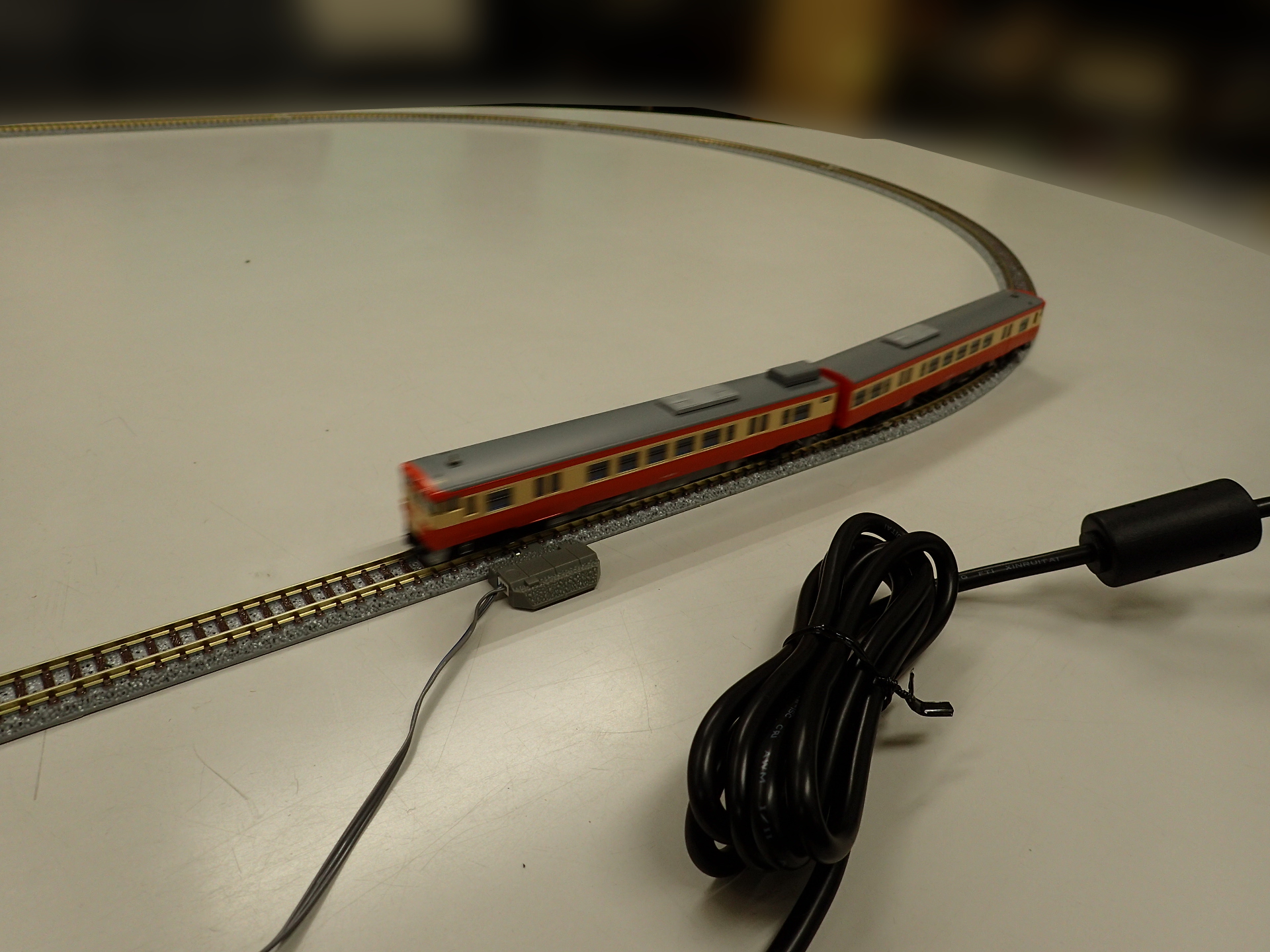
Arduino UNOとTOMIXのセンサー、そしてモーター制御モジュールのTA7291Pによる自動運転モデルを構築します。
ハードウェア的な配線は簡単に終了しました。
まずは、クモハ123−1ミニエコーによるテストランです。
センサーヒットで反転する様にしました。

次はHB−E300系リゾートビューふるさとによるテストランです。
当初、スピードはミニマムから上限までインクリメントする仕様でしたが、モーターの逆起電力によるのか途中から走らなくなるため、やむなくスピード固定としました。
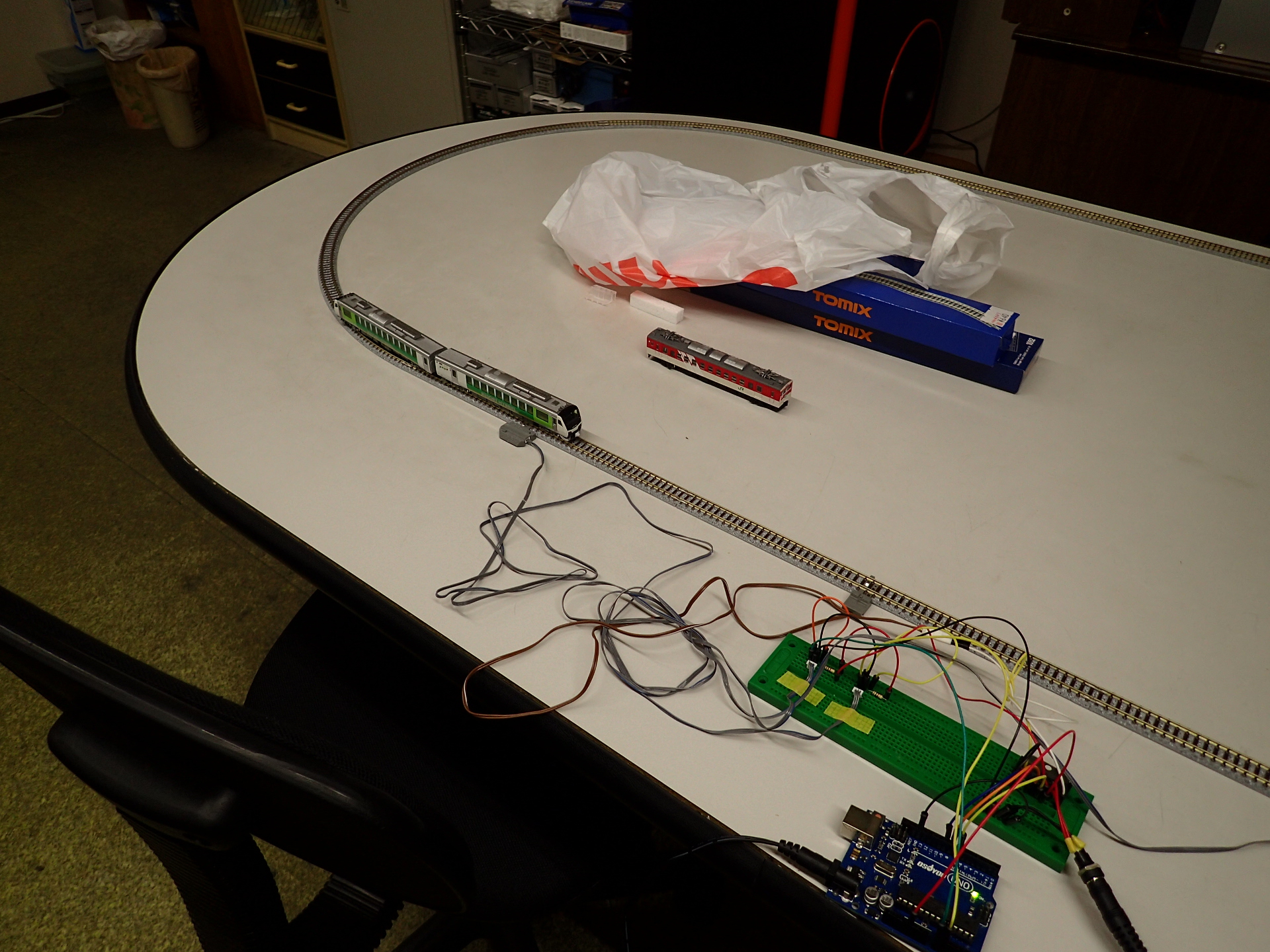
遂にキハ47系ノスタルジーを参戦させます。

アナログ値200程度の仕様で走行させます。

次回はこれにポイント制御を組み込みます。
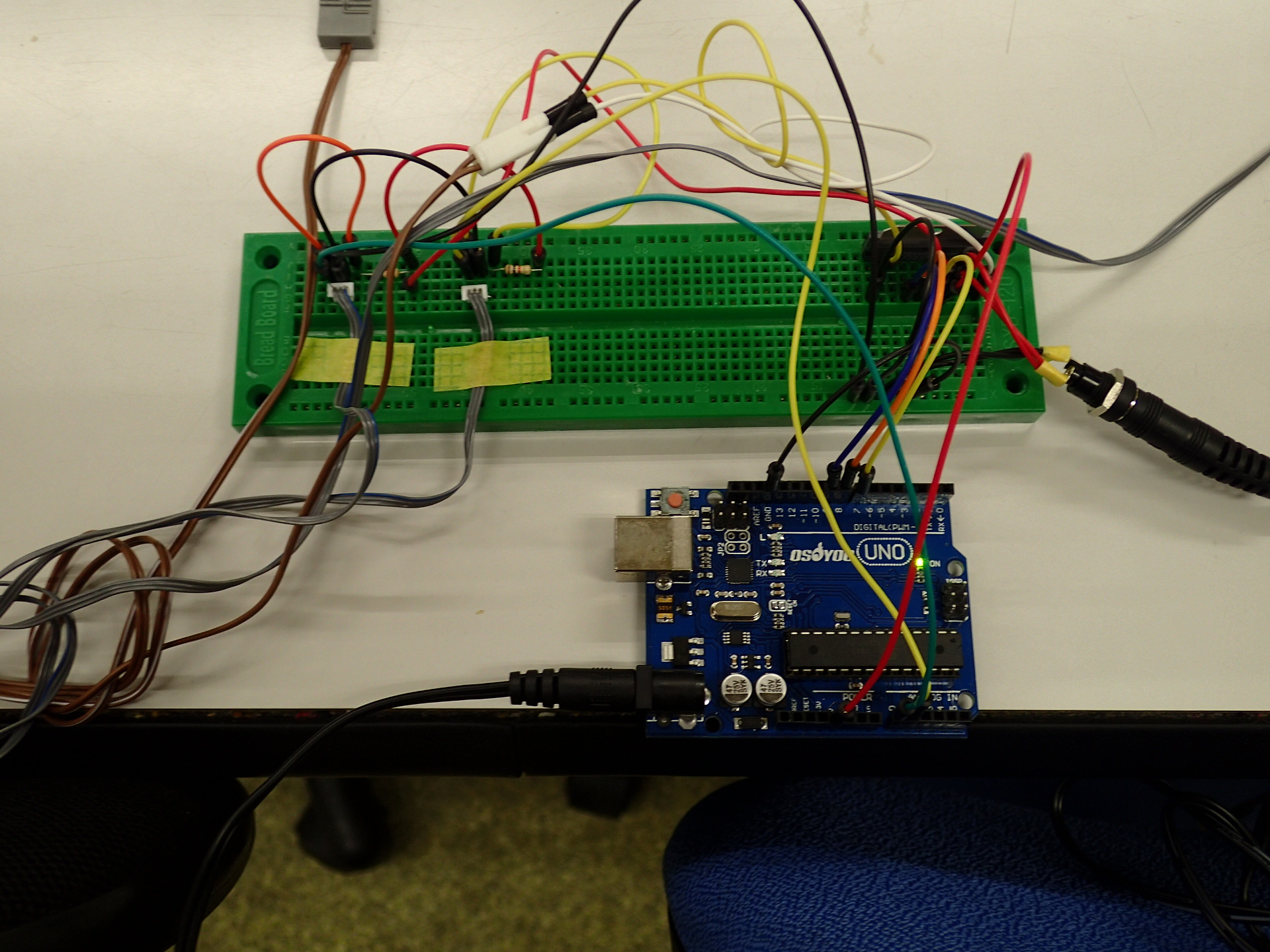
回路の全貌です。最終的にはブレッドボードを卒業して、それぞれの回路として使われます。
明日の鉄道模型コンテストとメーカーズフェアTOKYO2017に対しちょっとした自慢ネタが出来ましたw。
約10時間後には、ここを通過していることでしょう。

阪急8300系です。
iPhoneのiOSをアップデートしました。
夏の風物詩である甲子園球場での高校野球。
今年も明徳義塾が泊まりに来ました。
九州新幹線を見ながら出社です。
今日も昼食は糖尿病食です。
Arduino UNOとTOMIXのセンサー、そしてモーター制御モジュールのTA7291Pによる自動運転モデルを構築します。
ハードウェア的な配線は簡単に終了しました。
まずは、クモハ123−1ミニエコーによるテストランです。
センサーヒットで反転する様にしました。
次はHB−E300系リゾートビューふるさとによるテストランです。
当初、スピードはミニマムから上限までインクリメントする仕様でしたが、モーターの逆起電力によるのか途中から走らなくなるため、やむなくスピード固定としました。
遂にキハ47系ノスタルジーを参戦させます。
アナログ値200程度の仕様で走行させます。
次回はこれにポイント制御を組み込みます。
回路の全貌です。最終的にはブレッドボードを卒業して、それぞれの回路として使われます。
明日の鉄道模型コンテストとメーカーズフェアTOKYO2017に対しちょっとした自慢ネタが出来ましたw。
約10時間後には、ここを通過していることでしょう。
鉄道模型 | - | -




